
The following paper was generated as accompanying material for the seminar
“multimedia in space”.
In the context of this paper the history of astronautics and its technical developments
in reference to computer science will be shown. Basically some systems, which
are able to fulfil their tasks independently, will be specified. For that different
satellites, which regard the earth, and the Hubble space telescope, that is
observing the aerospace, are presented in this paper.
To give an review of different satellite systems the tasks of some active remote
sensing satellites like the Quickbird satellite will be described. Furthermore
the both mars missions of NASA and ESA are compared, searching some similarities
and differences.
Der Weltraum übte schon auf frühste Zivilisationen große Faszination
aus. Die Konstellation der Sterne prägte das Weltbild verschiedener Kulturen
und spielte im Leben der Menschen immer eine große Rolle. Schon im alten
Ägypten stand das Interesse, den Himmel berechenbar zu machen, im Vordergrund.
Im 16. bzw. 17. Jahrhundert bemühten sich unter anderem die Astronomen
Galileo Galilei, Nikolaus Kopernikus und Johannes Keppler ihr Wissen über
unser Universum zu erweitern. Jedoch erst im 20. Jahrhundert gelang es der Menschheit,
die Phänomene des Weltraums hautnah mitzuerleben.
Mit immer neuer Technik versucht der Mensch auch die letzten Geheimnisse zu
lösen. Dabei bezieht er sich nicht nur auf den Weltraum. Noch heute werden
Inseln auf der Erde mittels neuester Fernerkundungssatelliten entdeckt, die
bis dato auf keiner Landkarte verzeichnet sind.
Trotz dieser Entdeckungen richtet sich das Hauptaugenmerk der Menschheit auf
das Weltall. Es gibt so viele Dinge die der Mensch noch nicht verstehen kann.
Die Möglichkeiten, die die neueste Technik uns näher bringt, sind
für jeden faszinierend. Gerade in Zeiten, in der die Angst vor Terror allgegenwärtig
ist, sehnt man sich danach einfach ins Weltall fliegen zu können, um eine
kurze Auszeit zu bekommen. Wenn man die Entwicklung der Erforschung des Weltalls
betrachtet, erkennt man schnell, dass die Menschheit trotz jahrtausend langer
Beobachtung doch erst noch am Anfang steht.
Und da kommt wieder die Technik ins Spiel. Sie hilft uns bei der Aufklärung
unsere Fragen. Sei es das Hubble Teleskop, das trotz seine anfänglichen
Probleme, die Reichweite des menschlichen Auges in Gebiete befördert hat,
die noch nie ein Mensch zuvor gesehen hat. Oder unser geheimnisvoller Nachbarplanet,
der gerade im Moment eine so große Anziehungskraft auf uns ausübt,
so dass die NASA und die ESA gleichzeitig eine Armada von technischen Geräten
in seine Richtung entsendet haben um zu klären, ob es Leben auf dem Mars
gab, und ob noch heute Leben auf ihm möglich ist.
Um genau diese technischen Geräte geht es in diesem Seminar. Die vorliegende
Ausarbeitung soll einen Einblick über den momentanen Stand der Entwicklung
geben. Dabei wird nicht nur auf das Hubble Teleskop und die Marsmissionen eingegangen,
sondern auch auf die geschichtliche Entwicklung der Raumfahrt und auf Fernerkundungssatelliten.
Seit 1942 gilt Peenemünde auf der Insel Usedom weltweit als Geburtsstätte der modernen Raumfahrt. Unmittelbar damit verbunden ist die sogenannte Wunderwaffe V2. Die als Waffe entwickelte Rakete tötete während des Zweiten Weltkrieges ab 1944 tausende Menschen in Großbritannien, Frankreich und Belgien. Die Tatsache, dass die V2 zur Vernichtung von Menschen entwickelt wurde, macht es schwer die Ingenieursleistung von Wernher von Braun wertfrei zu würdigen. Die V2 erreichte in der Testphase eine Flughöhe von etwa 90 km und eine Schubleistung von 25000 kg.
Als am 4. Oktober 1957 die Sowjets den ersten Satelliten mit dem Namen „Sputnik
1“ starteten, löste das bei den Amerikanern eine große Unruhe
aus, da es sich bei der Trägerrakete von „Sputnik 1“ um die
erste Interkontinentalrakete der Welt handelte. Die Sowjets wären somit
in der Lage gewesen, in wenigen Minuten eine Atombombe nach Amerika zu schicken,
was ihnen den strategisch wichtigen Erstschlag ermöglicht hätte .
Sputnik 1 war eine Wissenschaftssatellit, mit dem z.B. die Elektronendichte
der Ionosphäre und die Ausbreitung der elektrischen Wellen gemessen werden
sollte. Er hatte ein Gewicht von 80 kg und die Form einer Kugel. Die Außenhülle
bestand aus Aluminium, damit man ihn von der Erde aus erkennen konnte, wenn
er vom Sonnenlicht angestrahlt wurde.
Die Übermittlung der Daten erfolgte über die Frequenzen 20,005 und
40,002 MHz, wobei die Batterien eine Leistung von 1 Watt abgaben. Zusätzlich
sendete ein kleiner Radiosender ein „Biep-Signal“, das auf der ganzen
Welt empfangen werden konnte.
Die anfängliche Flugbahn von Sputnik 1 verlief zwischen 228 km im erdnächsten
und 947 km im erdfernsten Punkt, die sich später auf 200 km verminderte,
bis er nach 92 Tagen in der Erdatmosphäre verglühte.
Sputnik 1 bildete den Auftakt zum Wettlauf um die Vorherrschaft im Weltall zwischen
der USA und der Sowjetunion.
Am 2.11.1957 wurde mit „Sputnik 2“ das erste Lebewesen ins Weltall
geschickt. Als tierischer Astronaut wurde die Hündin „Lajka“
ausgewählt, die wegen der enormen Hitze nach nur wenigen Umrundungen verendete.
Das Gewicht von „Sputnik 2“ war auf über 500 kg angestiegen.
Die Hündin „Lajka“ war nicht das erste und letzte Tier, welches
in den Weltraum geschossen wurde und dabei sein Leben verlor.
Im Jahr 1958 wurde die National Aeronautics and Space Administration, kurz NASA, als direkter Nachfolger des National Advisory Commitee for Aeronautics (NACA) gegründet. Die Gründung der NASA ging auf den Schock zurück, der vom Start von „Sputnik 1“ in den USA verursacht wurde. Durch die Aktivität der NASA wurde eine klare Trennung zwischen militärischen und zivilen Weltraumprogrammen geschaffen.
Am 31.Januar 1958 wurde der erste Satellit der USA mit dem Namen Explorer in
den Weltraum mittels einer Trägerrakete transportiert, die unter anderem
von Wernher von Braun entwickelt wurde. Der berühmte Forscher Wernher von
Braun war nach dem Krieg von den Amerikanern mit in die Staaten beordert worden,
wo er seine Entwicklungen fortsetzen musste.
Der Explorer Satellit war auch wissenschaftlich bedeutend, da dieser mit seinem
Geigerzähler den Van-Allen Strahlungsgürtel entdeckte.
Lunika 3 wurde durch Funksignale von der Erde aus kontrolliert. Er umkreiste den Mond in einer Entfernung von 6.200 km, während die Rückseite von der Sonne beleuchtet war. Am 7. Oktober 1959 nahm das Kamerasystem insgesamt 29 Bilder auf, die ca. 70% der Oberfläche darstellten. Die Bilder wurden an Bord entwickelt und gescannt. Am 18. Oktober 1959 wurden 17 Bilder zur Erde übermittelt. Obwohl die Aufnahmen sehr unscharf waren, dienten sie trotzdem zur Herstellung eines ersten Atlas der Mondrückseite. Neben bergigen Oberflächen wurden zwei große dunkle Regionen entdeckt: das Mare Moscovrae und das Mare Desiderii.
Am 12.April 1961 überraschen die Sowjets die Amerikaner erneut, in dem sie den ersten Menschen mit einer Wostok Rakete ins Weltall schickten. Major Juri Alexejewitsch Gagarin umkreiste als erster Mann ca. neunundachtzig Minuten lang die Erde, bevor er wieder unbeschadet auf der Erde landete. Die Amerikaner mussten durch dieses Ereignis den zweiten schweren Schlag im Wettlauf um die Erforschung des Weltalls hinnehmen.
Obwohl die Amerikaner diese Etappe der Raumfahrtgeschichte verloren haben,
schicken sie am 5.Mai 1961, nur einen Monat nach Gagarins Weltraumflug, Alan
Shepard ins Weltall.
Er verbracht in seiner Raumkapsel "Freedom 7" nur etwa fünfzehn
Minuten im Weltall, bevor er wieder zur Erde zurückkehrte. 1971 wurde Alan
Shepard Kommandant von Apollo 14 und verbrachte 9 Stunden auf der Mondoberfläche.
Dadurch, dass die Sowjets den ersten Satelliten und den ersten Menschen ins Weltall geschickt hatten, fühlten sich die Amerikaner sehr in die Enge gedrängt. Deswegen verkündete Präsident J.F. Kennedy am 25.Mai 1961, dass die NASA bis zum Ende des Jahrzehnts eine Mondlandung durchführen wird. Ab diesem Zeitpunkt startet das Wettrennen zwischen der USA und der Sowjetunion um die Erkundung des Mondes.
Am 20.Februar 1962 umkreist John Glenn als erster Amerikaner die Erde (nachdem
Alan Shepard sich nur kurz im Weltall aufgehalten hatte.)
John Glenn wurde im Januar 1998 im Alter von 77 Jahren noch einmal am Bord der
Raumfähre Discovery in den Weltraum geschickt. Es sollte erforscht werden,
wie sich die Schwerelosigkeit auf den Körper von älteren Menschen
auswirkt.
Mit dem Kosmonauten Alexej Leonow brachten die Sowjets am 18.März 1965 den ersten Menschen ins All, der sein Raumfahrzeug verließ und nur mit einer Sicherheitsleine gesichert ca. zehn Minuten lang frei im Weltraum schwebte.
Im Dezember 1968 ging ein wenig glanzvolles Jahr für die USA, nachdem
Martin Luther King und Robert Kennedy ermordet wurden und massive Demonstrationen
gegen den Vietnamkrieg stattfanden, zu Ende.
Der 24. und der 25. Dezember ließen das Jahr nicht ganz so negativ erscheinen,
da die Amerikaner gegenüber den Sowjets weiter aufholen im Wettlauf um
das Weltall. Mit Apollo 8 umkreist das erste bemannte Raumfahrzeug den Mond.
Rund acht Jahre nachdem J.F. Kennedy das Apollo-Programm ins Leben gerufen
hat, war der Mond für Neil Armstrong und Edwin Aldrin in greifbarer Nähe.
Nach etwa 109 Stunden nach dem Start von Apollo 11 setzt Neil Armstrong seine
Fuß auf die Oberfläche des Mondes und sagt wohl einen der bekanntesten
Sätze in der Geschichte der Menschheit
„That is one small step for a man, one giant leap for mankind.”
Edwin Aldrin betrat als zweiter Mensch den Mond, während Neil Armstrong
eine Fernsehkamera aufbaute, mit der die Erde visuellen Kontakt zu den beiden
hatte. Die beiden Astronauten führten zunächst einige Tests durch
und sammelten Gesteinsproben vom Mond ein, bevor sie nach etwa 2 Stunden und
25 Minuten wieder zur Mondfähre zurück kehrte. Sie flogen zurück
zum Mutterschiff, indem Michael Collins die ganze Zeit um den Mond kreiste.
Die drei Astronauten kamen als Helden auf die Erde zurück, und die Amerikaner
hatten durch die Mondlandung die Sowjets im Wettlauf um das Weltall überholt.
Seit dem 21.Juli 1969 gibt es viele Menschen, die daran zweifeln, dass die Mondlandung
tatsächlich statt gefunden hat. Sie vermuten, dass alles von der NASA irgendwo
auf der Erde inszeniert wurde. So sind z.B. keine Sterne im Hintergrund zu sehen,
oder es gibt verschiedene Schatten von mehreren Lichtquellen. Die NASA streitet
natürlich alles ab, aber ob es nicht doch ein Trick war, kann man bis zum
heutigen Zeitpunkt nicht genau sagen.
Die Raumstation Saljut 1 wurde am 19. April 1971 in eine relativ niedrige Umlaufbahn
gebracht. Die Station war fast 16 Meter lang und wog etwa 19 Tonnen. Nachdem
die Kopplung von Saljut 1 und der Mission Sojus 10 nicht gelang, wurde dieser
Versuch abgebrochen. Im Juni 1971 folgte ein weiterer Versuch, bei der die Kopplung
funktionierte. Die drei Kosmonauten Dobrowolskij, Patsajew und Wolkow verblieben
und arbeiteten 23 Tage in der Station bis sie auf dem Heimflug mit ihrer Sojuskapsel
beim Wiedereintritt in die Erdatmosphäre auf tragische Weise durch einen
Defekt eines Druckausgleichsventils ums Leben kamen.
Die Station verglühte nach etwa einem halben Jahr Flugzeit am 11. Oktober
1971 in der Erdatmosphäre.
Die amerikanische Raumstation Skylab wurde am 14.Mai 1973 in eine Umlaufbahn
um die Erde gebracht. Von 1973 bis 1974 wurde Skylab von insgesamt neun Astronauten
( drei Mannschaften mit 3 Astronauten) besetzt. Sie führten astrophysikalische
Untersuchungen und Sonnenbeobachtungen durch. Außerdem unternahm die Besatzung
Experimente, um die Auswirkung der Schwerelosigkeit auf den Menschen während
eines Weltraumaufenthalts zu untersuchen.
1979 verglühte die Station programmgemäß, nachdem sie im Orbit
an Höhe verloren hatte.
Am 17.Juli 1975 koppelten eine Apollo und eine Sojus-Kapsel an einander an, so das sich die Kosmonauten Alexij Leonow und Walerij Kubasow und die Astronauten Thomas Stafford, Deke Slayton und Vance Brand im Weltall trafen. Dieses Ereignis war aus technischer Sicht keine Herausforderung, aber aus weltpolitischer ein Wunder. Dieses Rendezvous war trotzdem zwei Jahrzehnte lang einmalig, und hat darum einen hohen Stellenwert in der Geschichte des „Kalten Krieges“.
Am 20. Juli 1977 ereichte die Sonde Viking 1 den Mars und am 3. September 1977 die Sonde Viking 2. Die Viking-Lander waren die bis dahin erfolgreichsten Marsmissionen. Sie sendeten Panoramabilder von der Marsoberfläche und führten Bodenproben durch. Anhand dessen, konnten die NASA -Wissenschaftler der Menschheit mitteilen, dass es kein Leben auf dem Mars gibt.
Die Voyager-Missionen waren wohl die erfolgreichsten Missionen in der Geschichte
der Raumfahrt. Voyager 1 hatte die Aufgabe die Planeten Jupiter und Saturn mit
ihren Monden zu erkunden und Voyager 2 folgte ihr und erkundete zusätzlich
noch den Uranus (erst 1986) und den Saturn.(erst 1989). Die beiden Sonden befinden
sich nach Schätzungen zur Zeit außerhalb unseres Sonnensystems.
Als zusätzliche Aufgabe führen die Voyager-Sonden eine gold-schimmernde
"Schallplatte" mit sich, die "Sound of Earth" genannt wird.
Auf diesen Platten sind Grußbotschaften der Menschen mit Bildern und Geräuschen
unseres Planeten vorhanden, um eventuellen fremden Intelligenzen, die auf die
Sonde stoßen sollten, zu offenbaren, woher dieser "Reisende"
kommt.
SpaceLab war das erste europäische Weltraumlabor, das am 28. November
mit Hilfe von einem amerikanischen Space Shuttle in eine Erdumlaufbahn gebracht
wurde.
Es wurde für medizinische Forschungen, Erdbeobachtungen sowie für
biologische, technische und physikalische Experimente benutzt. Seit 2000 wird
es als Trainingseinheit und Vorbereitung für Experimente im All genutzt.
Am 28.Januar 1986 explodierte die Trägerrakete samt dem Space Shuttle Challenger nur 73 Sekunden nach dem Start. Bei diesem Unfall starben sechs Astronauten und eine Lehrerin. Die Lehrerin Christa McAuliffe war mit an Bord der Challenger um ihre Schulklasse aus dem Weltall zu unterrichten.
Am 20. Februar 1986 wurde das Basismodul der MIR in das Weltall gebracht. Trotz
des Zusammenbruchs der Sowjetunion und der Finanzprobleme des Landes wurde die
Endkonfiguration der MIR mit dem Start des Moduls Piroda am 23. April 1996 vollendet.
Die MIR dient für viele Experimente als Raumstation, aber die Probleme
durch Pannen und kleine Katastrophen nahmen im Laufe der Zeit zu.
Der Rover Sojourner der Pathfinder-Mission galt als Generalprobe für die Mars Exploration Rover. Die aus der Pathfinder-Mission gewonnenen Informationen wurden in der Entwicklung und Ausarbeitung der Mars Exploration Rover Mission verwendet. Die Pathfinder-Sonde schickte über 16500 Fotos zur Erde und Sojouner schickte über 500 Fotos sowie Analysewerte von 16 Untersuchungsobjekten.
Schon im Jahr 1984 kurz nach der SkyLab Mission kündigt US Präsident
R. Reagan an einer weiteren amerikanischen Raumstation zu bauen. Schon zu diesem
Zeitpunkt lud er andere Staaten zur Zusammenarbeit ein. Kanada, Europa, Japan
und später auch Russland folgten dieser Einladung und wollten an der auf
„Freedom“ getauften Station mitarbeiten.
Am 20. November 1998 wurde das erste Modul der Internationalen Raumstation ISS
dann mit einer russischen Trägerrakete in seine Umlaufbahn gebracht.
Nach 13 Jahren kehren die letzten Kosmonauten von der Raumstation MIR auf die Erde zurück.
Am 23.März 2001 wurde die MIR kontrolliert zum Absturz gebracht. Die Teile, die nicht beim Eintritt in die Erdatmosphäre verglühen stürzen in ein unbewohntest, Gebiet im Südpazifik. Die Ära MIR ist nach 15 Jahren zu Ende.
Die erste ständige Besatzung besteht aus dem Amerikaner Bill Shepherd
und seinen beiden russischen Kollegen Jurji Gidzenko und Sergej Krikalew. Diese
treffen Anfang November auf der ISS ein.
Im folgenden Kapitel sollen verschiedene Arten von Satelliten, ihr Aufbau, ihre Aufgaben und die verschiedenen Umlaufbahnen vorgestellt werden. Das Hauptaugenmerk wird hierbei auf Fernerkundungssatelliten gelegt. Um einen Überblick über den momentanen Stand der Technik zu geben, werden die Systeme Spot, Ikonos und Quickbird als Bespiele herangezogen.
Seit „Sputnik 1“ gibt es eine Vielzahl von Satelliten, die die
verschiedensten Aufgaben erledigen. Auch die Satellitentechnik hat sich verbessert.
Es gibt zur Zeit spezielle Studiengänge, die sich mit der Entwicklung von
neuen Satelliten beschäftigen. Ein Leben ohne Satelliten wäre für
die moderne Zivilisation nicht mehr denkbar.
So werden z.B. fast alle Fernsehkanäle über Satelliten übertragen,
wobei es keine Rolle spielt ob man eine eigene Satellitenanlage besitzt, oder
sein Fernsehprogramm über Kabel bekommt.
Es gibt um die Erde herum verschieden Umlaufbahnen, auf denen sich die Satelliten befinden. Jede dieser Umlaufbahnen hat verschiedene Eigenschaften, d.h. die Satelliten bewegen sich von der Sicht der Erde aus verschieden. Während einige still zu stehen scheinen, fliegen andere über uns hinweg und kehren erst nach einiger Zeit zurück.
Satelliten, die sich in der geostationären Umlaufbahn befinden, haben
eine Flughöhe von ca. 36000 km und befinden sich direkt oberhalb des Äquators.
Sie haben eine feste Position, da sich immer über dem gleichen Gebiet auf
der Erde befindet. Aus diesem Grund werden sie für die Rundfunk- und Fernsehübertragung
genutzt. Sie sind jedoch im Vergleich zu anderen Satelliten sehr groß
und teuer.
Bei der Übertragung von Signalen eines geostationären Satelliten zur
Erde kommt es zu einer Verzögerung von einer Viertelsekunde.
Satelliten die sich in einer mittleren Erdumlaufbahn befinden, fliegen in einer
Höhe von ca. 9.600 km und mehr um die Erde.
Um eine flächendeckende Versorgung der Erde zu erreichen, sind zwei Dutzend
Satelliten in der mittleren Bahn notwendig. Sende- und Empfangsgeräte brauchen
für die Übertragung von Daten zu den MEO-Satelliten relativ viel Energie.
Die LEO-Satelliten haben eine Flughöhe von 600 bis 1.600 km und sind am
häufigsten im Weltall vertreten.
Sie sind besonders klein, leicht und günstig. Durch die geringe Entfernung
zur Erde, kommt es zu keiner Signalverzögerung. Außerdem benötigen
die Endgeräte wenig Energie, so dass diese Satelliten-Systeme sehr gut
für Satelliten-Telephonie geeignet sind.
Satelliten bestehen aus einer Vielzahl von Instrumenten, die sich je nach Aufgabengebiet unterscheiden. Heute gibt es spezielle Studiengänge, die sich mit der Nutzlast von Satelliten beschäftigen. Im Folgenden soll deshalb nur ein grober Einblick in die Bestandteile eines Satelliten gegeben werden.
Damit ein Satellit zu jeder Zeit mit der benötigten Energie versorgt wird,
befindet sich an Bord das sogenannte EPS ( zu deutsch: Stromversorgungseinheit).
Das EPS steuert also die Verteilung und den Verbrauch der an Bord eines Satelliten
befindlichen Energie.
Die hauptsächliche Energie gewinnt ein Satellit durch seine Solarsegel,
mit denen die Sonnenenergie in elektrische Energie umgewandelt wird, um somit
die sich an Bord befindlichen Batterien aufzuladen. Befindet sich der Satellit
nicht im Strahlungsbereich der Sonne, greift er automatisch auf die gespeicherte
Energie in den Batterien zurück, um so sicher zu stellen, dass alle Bauteile
mit genügend Strom versorgt werden.
Mit Hilfe der Positions- und Orbit-Kontrolleinheit (AOCS) wird permanent die
Position eines Satelliten ermittelt und gesteuert. Dadurch wird er während
der gesamten Mission in der gewünschten Position gehalten.
Soll die Position geändert werden, werden die sogenannten Whells eingesetzt,
die in der Lage sind, den Satelliten um drei Achsen zu bewegen. Um den Orbit
zu wechseln, benötigt man die Düsen (Thruster) oder das Haupttriebwerk,
welches aber nicht zwangsläufig in jedem Satelliten benötigt wird.
Änderungen der Position oder des Orbits können vom Satelliten automatisch
oder von der Bodenkontrolle aus durchgeführt werden. Die Bodenkontrolle
erhält die Daten in Form von Telemetry vom Satelliten.
Das OBDH ist die Hauptsteuereinheit eines jeden Satelliten. Sie verarbeitet alle internen und externen Daten. Man kann das OBDH in drei Teile unterteilen. Auf der einen Seite gibt es die CDMU (Controlling DATA Main Unit), welche, schon wie der Name erahnen lässt, die Hauptsteuereinheit ist. Auf der anderen die RTU (Remote Control Unit), welche die Steuerung des Datenfluss des Mainbus übernimmt, und der Mainbus selbst.
Das RFS ist die Sende- und Empfangseinheit eines Satelliten, welche Daten in
Form von Telecommands von der Erde empfängt und z.B. Telemetrydaten zur
Erde schickt.
Um eine Verbindung zur Erde zu realisieren, werden zwei Arten von Antennen eingesetzt.
Zum eine gibt es die LowGain Antennen, die zur Übertragung der Daten in
Erdnähe benutzt werden (LEO-Orbit), und zum anderen die HighGain Antennen,
die eingesetzt werden, wenn sich der Satellit weit von der Erde entfernt befindet
(GEO-Orbit).
Die Temperaturregelung eines Satelliten wird vom TCS übernommen. Da ein
Satellit während seiner Mission teilweise extremen Temperaturschwankungen
ausgesetzt ist, ist es wichtig, dass die empfindlichen Bauteile eine relativ
konstante Temperatur besitzen.
Hierbei werden zwei Verfahren zum Schutz vor Hitze und Kälte eingesetzt.
Die passive Kühlung besteht aus einer Art Wärmeschutz, der den Satelliten
mit einer aufgetragenen Substanz vor der Hitze schützt. Um den Satelliten
vor der Kälte zu schützen, wird das aktive System benutzt. Es besteht
aus Heißelementen (Heater), die bestimmte Baugruppen bei zu geringer Temperatur
aufheizen.
Heutzutage gibt es eine Vielzahl von verschiedenen Satelliten, welch unterschiedlichen
Aufgabengebieten geordnet werden können.
Es gibt Wettersatelliten, anhand deren Bilder vorausgesagt werden kann, wie
sich das Wetter in den nächsten Tagen entwickelt. Des weiteren befinden
sich in einer geostationären Umlaufbahn Rundfunk- und Fernsehsatelliten,
die die Erde mit Fernsehprogrammen versorgen.
Das Benutzen von GPS – Systemen, die heutzutage einen immer wichtigeren
Stellenwert haben, ist nur durch Navigationssatelliten möglich.
Man könnte noch mehr Aufgaben von Satelliten beschreiben, was aber im Rahmen
dieser Ausarbeitung zu weit gehen und vom eigentlichen Thema ablenken würde.
Zwei Arten von Satelliten seien aber trotzdem etwas näher betrachtet: zum
einen die Fernerkundungssatelliten und zum anderen Spionagesatelliten.
Solang es die Menschheit gibt, gibt es auch Spionage, während sie sich
früher „nur“ darin äußerte, dass einzelne Person
(Spione) andere ausspionierten, werden heute Konzerne oder ganze Staaten überwacht.
Gerade zu Zeiten des „Kalten Krieges“ wurde die Spionage ein immer
wichtigeres Mittel, um alles über den Feind zu erfahren.
Mit der Zeit stieg die Gefahr, dass Spionage aufgedeckt wurde, und man musste
neue Wege beschreiten seinen Gegner zu bespitzeln. Also wurden auch Satelliten
eingesetzt, da sie viel schwerer zu entdecken waren, als beispielsweise die
U2 (ein amerikanisches Spionageflugzeug). Anfangs kamen Satelliten zum Einsatz,
die wegen ihrer geringen Flughöhe nach einigen Tagen in der Atmosphäre
verglühten. Bevor dies allerdings geschah wurden die belichteten Filme
zur Erde fallen gelassen. Vor dem Erreichen des Bodens wurden die Filme von
Flugzeugen abgefangen (siehe Bild). Heutzutage bleiben Spionagesatelliten längere
in einer Erdumlaufbahn, und ihre Daten werden auch nicht mehr mittels Fallschirmen
zur Erde geschickt, sondern über abhörsichere Kanäle.
Da es fast keine Daten über Spionagesatelliten gibt, will ich mich nicht
in Spekulationen verfangen. Die technische Entwicklung soll aber soweit sein,
dass die Satellitenbilder eine Auflösungen von 0.10 cm haben.
Abb. 1 Ein amerikanische Flug fängt einen Satellitenfilm ein
Während Spionagesatelliten einem rein militärischen Zweck dienen,
werden die Daten von Fernerkundungssatelliten kommerziell genutzt. Die Daten
können für die Gestaltung von neuen Straßen oder Städten
benutzt werden, oder dazu, rechtzeitig Gefahrenbereiche, in denen es z.B. zu
Überschwemmungen kommen kann, ausfindig zu machen. Sie werden aber auch
genutzt, um Kartenmaterial auf dem neuesten Stand zu halten oder zu überprüfen,
ob Bauer A. seine Felder so bestellt, wie er es beantragt hat.
Im Groben gibt es zwei Systeme, die für die Fernerkundung in Frage kommen.
Die Radarsatelliten senden Radarstrahlen zur Erde von der sie reflektiert werden,
und wieder am Satellit angelangen. Durch ein unterschiedliches Eintreffen der
Strahlen kann z.B. ein Höhenmodell erstellt werden. Zum anderen gibt es
optische Systeme, die Fotos von der Oberfläche schießen. Beide Systeme
haben für bestimmte Aufgabenbereiche ihre Vor- und Nachteile, aber einen
entscheidenden Nachteil haben die optischen Systeme. Während Radarsysteme
auch bei schlechtem Wetter ihre Arbeit fortsetzen können, können z.B.
Wolken optischen Systemen die Sicht nehmen.
Da es sich aber bei diesem Seminar um ein Multimedia bezogenes Seminar handelt,
werde ich im Folgenden nur auf optische Systeme eingehen. Um einen kleinen Überblick
über mögliche Auflösungen bei optischen Systemen zu geben, sollen
die folgenden drei Bilder dienen.

Abb. 2 Vergleich zwischen verschiedenen Satellitensystemen
Man kann auf den Bildern sehen, dass man auf dem Landsatbild eigentlich nicht viel erkennen kann, aber auf dem Ikonosbild schon viel mehr. Um einen Überblick über aktuelle Fernerkundungssatelliten zu geben, sollen im Folgenden die Systeme Spot, Ikonos und Quickbird dienen.
Am 22.2.1986 wurde mit Spot 1 der erste Satellit der Spotreihe in eine erdnahe Umlaufbahn gebracht. Das Spotprogramm sollte das erste kommerzielle Erderkundungssatellitenprogramm der Welt sein. Das war nicht ganz der Fall, da es sich bei dem Betreiber der Spotsatelliten, um eine Tochterfirma der französischen Raumfahrtorganisation CNES handelt. Es war geplant mit dem Verkauf der Satellitenbilder die laufenden Kosten und neue Satelliten zu finanzieren. Dieses Konzept ist bis heute nicht aufgegangen, so dass gerade einmal die laufenden Kosten mit den Verkäufen getilgt werden konnten.
Gegenüber früheren Erderkundungssatelliten wie z.B. der Landsatsatelliten, war Spot 1 mit CCD – Sensoren ausgestattet, was ihn wesentlich moderner machte.
Wie schon erwähnt startete Spot 1 am 22.02.1986. Ihm folgte am 22.1.1990
Spot 2 und am 26.9.1993 Spot 3.
Die ersten drei Spot-Satelliten besaßen in etwa die gleichen technischen
Eigenschaften. Sie waren mit einem 120 Gbit Bandrekorder ausgestattet, auf dem
ca. 280 unkomprimierte Bilder gespeichert werden konnten, bevor sie zur Erde
gesendet wurden.
Leider fielen die Bandrekorder nach einiger Zeit aus, so dass die Spotsatelliten
keine Bilder mehr zwischenspeichern konnten. Das führte dazu, dass sie
nur noch in bestimmten Gebieten Bilder aufzeichnen konnten, in deren Nähe
sich eine Bodenstation befand ( jede Bodenstation hat einen Empfangsradius von
etwa 1250 km, es gibt auf der gesamten Erde 23), da die Bilder direkt zur Erde
geschickt werden mussten. Trotz dieser Probleme sendeten Spot 1 und Spot 2 bis
1998 etwa sechs Millionen Bilder zur Erde. Nachdem das Lageregelungssystem von
Spot 3 im Jahre 1996 ausgefallen war, verglühte er in der Atmosphäre.
Die Satellitenbilder von Spot 1-3 können eine Auflösung von 6000
x 6000 Pixel ( multispektral ) oder 3000 x 3000 Pixel ( panchromatisch ) erreichen.
Das an Bord befindliche Weitwinkelteleskop hat einen Blickwinkel von 4 Grad
( das entspricht am Boden 60km). Es besitzt einen Durchmesser von 30 cm bei
einer Brennweite von 1.08m . Das Teleskop ist um 27 Grad seitlich schwenkbar,
was dazu führt, dass Spot Bereiche der Erde aufnehmen kann, die sich nicht
nur direkt unterhalb seiner Flugbahn befinden. Eine CCD Zeile besteht aus 6000
Elementen.
Spot 1-3 konnten Bilder mit einer Auflösung von 10m (panchromatisch) oder
20m (multispektral) aufzeichnen.
Spot 4 wurde am 24.04.1998 in seine Umlaufbahn gebracht. Durch die negativen
Erfahrungen die man mit den Bandrekordern von Spot 1-3 gesammelt hatte, wurden
bei Spot 4 mehrere RAM Speicher verwendet, die zusammen ca. 600 Bilder speichern
konnten.
Spot 4 war den vorangegangenen Spot – Satelliten sehr ähnlich. Trotzdem
hob sich die Spot 4 Mission durch einen Test hervor.
Da es um die Erde herum mittlerweile eine Vielzahl von Satelliten gibt, wird
es in nächster Zeit zu einem Datenstau über unseren Köpfen kommen.
Um dieses Problem rechtzeitig zu lösen, gibt es verschieden Ansätze,
die Datenmengen mit neuer Technik zu senden. Eine Überlegung geht dahin,
dass man Daten mittels einem Laserstrahl überträgt, da durch seine
Kurzwelligkeit in geringerer Zeit mehr Daten übertragen werden können.
Das ist aber nicht so einfach zu realisieren, da Satelliten wie z.B. Spot 4
sich immer nur eine kurze Zeit über einem bestimmten Gebiet auf der Erde
befinden. Um dieses Problem zu lösen, werden sogenannte Relaissatelliten
eingesetzt. Sie befinden sich meistens in einer geostationären Umlaufbahn
und werden für die Übertragung von großen Datenmengen benutzt
(Rundfunk und Fernsehen). Die Sendeleistung von Fernerkundungssatelliten ist
im Vergleich hingegen eher gering, sodass man „nur“ eine Verbindung
zwischen Fernerkundungs- und Relaissatelliten schaffen müsste, um die Übertragungsrate
zu erhöhen. Genau das wurde bei der experimentellen Laserlink-Kopplung
zwischen Spot 4 und Artemis getestet. Artemis ist ein Kommunikationssatellit,
der, nachdem er in einem falschen Orbit ausgesetzt wurde seine Zielposition
in einem geostationären Orbit nur mit viel Zeitverlust und dem Einsatz
seiner Thruster erreichen konnte. Trotz dieser Probleme von Artemis konnten
die Tests Ende 2002 gestartet werden. Die beste Übertragungsrate zwischen
Artemis und Spot 4 beträgt 50 Mbit\s was nicht unbedingt den Erwartungen
entspricht (mind. 100 Mbit\s), aber trotzdem den Erfolg dieser Test nicht wesentlich
schmälert.
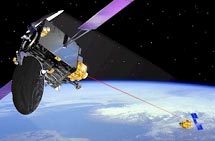
Abb. 3 Laserlink zwischen den Satelliten Spot 4 und Artemis
Während sich die technischen Veränderungen zwischen Spot 1 und Spot
4 eher im Rahmen hielten, enthielt der am 04.05.2002 gestartete Spot 5 eine
Vielzahl von Neuerungen.
Gegenüber Spot 4 wurde die Instrumentierung weiter verbessert. Das Kamerasystem
von Spot 5 besteht nun aus drei Kamerasystemen, die in der Lage sind, in drei
Richtungen gleichzeitig aufzunehmen. Während, wie schon bei Spot 1-4, eines
senkrecht nach unten ausgerichtet ist, gibt es ein weiteres, welches nach vorne
(um 20°) und eines, das nach hinten (um 20°) schaut. Durch diese Ausrichtung
der Kamerasysteme ist es möglich, dreidimensionale Bilder der Erde zu erstellen.
Die Auflösung wurde auf 5 m im panchromatischen mode und 10 m im multispektral mode verbessert. Es ist auch möglich, panchromatische Bilder mit einer Auflösung von 2,5 m zu erstellen. Um dies zu erreichen, werden gleichzeitig zwei Aufnahmen mit je 5 m aufgenommen, die dann später mittels Computer in ein 2.5 m Bild umgewandelt werden.
Da die aufgenommenen Bilder eine größere Datenmenge gegenüber z.B. Spot 1 besitzen, werden sie, bevor sie mit 100 Mbaud zur Erde gesendet werden, komprimiert. An Bord von Spot 5 befindet sich ein 90 GBit RAM Speicher, auf dem die Daten zwischengespeichert werden können.
Spot 5 kann auch im Gegensatz zu Spot 4 nicht nur 2 Bilder gleichzeitig aufnehmen,
sondern 5. Von den 5 Bildern können max. gleichzeitig 3 gespeichert werden,
so dass die anderen beiden zur Erde übermittelt werden müssen.

Abb. 4 Zeichnung des Spot 5 Satelliten
Am 24.09.1999 wurde nach einigen Startschwierigkeiten (Startverschiebung vom
27.04.1999 auf den 24.09.1999) der erste rein kommerzielle Satellit in seine
Umlaufbahn gebracht. Ikonos wird von der Fa. SpaceIMAGING unterhalten. Bei Ikonos
scheint das Konzept aufzugehen, dass der Verkauf der Bilder die laufenden Kosten
deckt und neue Satelliten mitfinanziert.
Ikonos umkreist die Erde in einer Höhe von 680 km mit einer Geschwindigkeit
von 7 km\s. Sein Gewicht hat sich im Vergleich zu anderen Satelliten verringert
(ca. 755 kg).
Die Aufnahmetechnik wurde gegenüber Spot 5 verbessert. Ikonos hat eine
Auflösung von 1m panchromatisch und 4m multispektral. Seine Bildbreite
beträgt 13 km. Im multispektralen Modus gibt es 11 Helligkeitsbits und
im panchromatischem Modus nur 8.
Die Kanäle von Ikonos sind :
· panchromatischer Kanal : 450-900 nm
· blauer Kanal : 450-530 nm
· grüner Kanal : 520-610 nm
· roter Kanal : 640-720 nm
· naher IR Kanal : 770-880 nm
Von den Möglichkeiten der Aufnahmetechnik von Ikonos haben sich Journalisten
viel versprochen. Sie hofften mit den Aufnahmen endlich mit zu erleben, was
sich wirklich in Afghanistan und im Irak während dem Einsatz von US-Truppen
ereignete. Viele hofften, dass mit den Bildern, die Geheimhaltungstaktik der
Amerikaner diesbezüglich Risse bekommen könnte. Aber auch diese Möglichkeit
der Informationsfindung wurde vom Pentagon verhindert. Es wurden kurzer Hand
alle Bilder, die während der Konflikte in Afghanistan und im Irak aufgezeichnet
wurden, für ca. 2.000.000 US-Dollar pro Jahr gekauft, so dass eine Verbreitung
der Bilder unmöglich ist.

Abb. 5 Zeichnung des Ikonos Satelliten

Abb. 6 Satellitenbild von Ikonos ( Sydney , Auflösung 1m)
Am 18.10.2001 wurde Quickbird mit einer Delta Trägerrakete in eine Höhe
von 450 km gebracht. Nicht etwa eine verbesserte Technik ist für das gesteigerte
Auflösungsvermögen verantwortlich, sondern die geringe Flughöhe
von Quickbird. Da Quickbird etwa die gleiche Auflösung wie Ikonos gehabt
hätte, entschloss man sich ihn in einer geringeren Höhe zu bringen
um so doch noch bessere Bilder liefern zu können.
Quickbird nimmt Bilder mit einer Auflösung von 61 cm panchromatisch und
2,4 m multispektral auf. Ein Bild hat bei einer Szenengröße von 16.5
x 16.5 km eine Auflösung von 27,552 x 27,424 Pixeln panchromatisch und
6,888 x 6,856 Pixeln multispektral. Quickbird ist auch in der Lage sogenannte
„Strips“ aufzunehmen, d.h. Bilder mit einer Breite von 16.5 km und
einer Länge 165 km. Alle Kanäle haben 11 Bits für die Helligkeit.
· panchromatischer Kanal : 445-900 nm
· blauer Kanal : 450-520 nm
· grüner Kanal : 520-600 nm
· roter Kanal : 630-690 nm
· naher IR Kanal : 760-900 nm.
Die Bilder können auf einem 128 GBit großem Speicher abgelegt werden,
oder über das X-Band mit 320 Mbit\s zur Erde gesendet werden. Es ist geplant,
dass Quickbird sieben Jahre lang seine Arbeit verrichtet.
Quickbirdbilder, die Afghanistan und den Irak zeigen, wurden ebenfalls vom Pentagon
komplett aufgekauft, wie es schon bei den Bildern von Ikonos zuvor geschehen
ist.

Abb. 7 Zeichnung des Quickbirdsatelliten

Abb. 8 Satellitenbild von Quickbird (Hamburger Hafen, Auflösung 0.6 m)

Abb. 9 Das Hubble Space Teleskop
Im letzten Kapitel konnte man sehen wie die Erde vom Weltall aus beobachtet
wird, aber auch das Weltall selbst ist für den Menschen fast noch wichtiger.
Seit Menschengedenken hat das Weltall eine große Anziehungskraft, sodass
es viele Menschen gab, die sich mit seiner Erforschung beschäftigten. Während
Galileo fast für seine Behauptung, dass die Erde keine Scheibe sei, durch
die Inquisition hingerichtet wurde, ist es heutzutage einfacher, bestimmte Behauptungen
der Menschheit zu beweisen. Es gibt mittlerweile eine Vielzahl von Teleskopen,
die die Aufgabe haben, die letzten Geheimnisse des Weltalls zu lüften.
Wenn man die Vielzahl der auf der Erde befindlichen Teleskope sieht, stellt
man sich die Frage was da ein Milliarden teures Weltraumteleskop überhaupt
für einen Sinn macht. Aber die Antwort auf diese Frage ist ganz leicht:
jedes Teleskop das sich auf der Erde befindet hat immer ein Darstellungsproblem,
denn die Atmosphäre der Erde führt dazu, dass ein Flimmern eine 100
% Sicht auf Sterne oder Planeten verhindert. Auch Wolken und schlechtes Wetter
können die Sicht auf das Weltall einschränken.
Um diese, Probleme zu umgehen, wurde am 24. April 1990 das Hubble Space Teleskop
von der Raumfähre Discovery in seine etwa 600 km hohe Umlaufbahn gebracht.
Seit 1977 war ein Weltraumteleskop in der Planung, zunächst nur von der
NASA. Durch die damals schon sehr hohen Kosten von etwa 450 Millionen US Dollar
wurde die NASA aufgefordert, sich einen Partner zu suchen, der die Kosten mit
tragen sollte. So stieg ESA mit 15 % in das Vorhaben ein, was ihnen 15% der
Beobachtungszeit sicherte. Ob die ESA sich aber mit dem Wissen der endgültigen
Kosten an dem Unternehmen beteiligt hätte, ist wohl eher fraglich. Nachdem
sich Hubble im Weltall befand, waren die Kosten bereits auf 1,6 Milliarden Dollar
gestiegen.
Nach den ersten Testläufen war schnell klar, dass Hubble einen optischen
Fehler hatte, der nur mit einer Service Mission zu beheben war. Obwohl Hubble
nicht 100% einsatzfähig war, liefert es schon beeindruckende Bilder, die
alles bisher da gewesene übertrafen.
Das Hubble hat in etwa die Ausmaße eines Busses. Es ist 13,1 m lang,
hat einen Durchmesser von 4,3 m und wiegt etwa 11,6 t. Es wurde so entwickelt,
dass es möglichst viele astronomische Objekte ohne das Eingreifen des Menschen
beobachten kann. Es ist in der Lage so positioniert so werden, dass es 24 Stunden
lang ein Objekt beobachten kann. Das HST kann Licht in allen Wellenlängen
von infrarotem über sichtbares bis hin zu ultraviolettem Licht messen,
so dass man alle Arten von Objekten, die sich im Weltall befinden erforschen
kann. Man könnte mit dem HST ein Glühwürmchen sehen, dass sich
in 16.000 km Entfernung befinden würde.
Da das Hubble keine Steuerdüsen besitzt, und es von der Erde angezogen
wird, ist es notwendig, dass nach einem bestimmten Zeitraum ein Raumfahrzeug
das HST wieder in eine sichere Umlaufbahn bringt. Genau an diesem Punkt liegt
das momentane Problem des Hubble. Da seit dem Columbia-Unglück das Space
Shuttleprogramm eingefroren ist, ist es fraglich ob das HST vor dem Verglühen
in der Atmosphäre gerettet wird. Zum jetzigen Zeitpunkt ist noch nicht
über die Zukunft des Hubble entschieden.
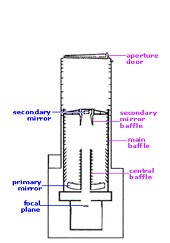
Abb. 10 Innenansicht vom Hubble
Der Tubus des Hubbles wird, wird von einer Schutzklappe geschützt, wenn es nicht benutzt wird. Wird diese Schutzklappe für eine Beobachtung geöffnet, wird das einfallende Licht von dem Streulicht durch die sogenannten Baffle geschützt. Die Baffle haben in etwa die gleichen Aufgaben, wie Eierpackungen an den Wänden eines Tonstudios, die alle störenden Schallwellen schlucken sollen. Das Licht trifft danach auf den Hauptspiegel (Durchmesser 2,7 m), bevor es von ihm reflektiert zum Sekundärspiegel ( Durchmesser 0,3m) gelangt. Auf dem Weg dorthin wird wieder Streulicht durch Baffle gefiltert. Nachdem es auf den sekundär Spiegel aufgetroffen ist, trifft das Licht nach dem Durchschreiten der Central Baffle auf die Instrumente, die das Licht auswerten.
Das Hubble kann nicht direkt mit der Erde kommunizieren. Es braucht einen Relaissatelliten
der das Hubblesignal zur Erde, oder die Signale von der Erde zum Hubble sendet.
Der Satellit sendet die Daten zur White Sand Test Facility, die die Daten dann
zum NASA Goddard Space Flight Center übermittelt. Das NASA Goddard Space
Flight Center ist im Schichtsystem 365 Tage, 24 Stunden im Jahr besetzt, um
das Hubble zu kontrollieren. Die Hauptaufgaben der Steuerung des HST übernimmt
das Space Telescope Operation Center, zu dem die Daten zum Schluss übermittelt
werden. Auch das Space Telescope Operation Center ist im 24 Stunden-Schichtdienst
besetzt.
Jeder hat die Möglichkeit eine Beobachtung mit dem Hubble zu beantragen.
Der Vorschlag wird von einem Gremium von Wissenschaftlern geprüft, und
wenn er für wichtig empfunden wird, bekommt der Vorschlag ein Beobachtungsfenster.
Bis heute hat es etliche Servicemissionen gegeben, die das Hubble repariert, gewartet oder verbessert haben. Mit dem HST wurden 330.000 Observationen an 25.000 Objekten durchgeführt, was zu einer geschätzten Datenmenge von 10 Terabyte führt.
Obwohl über die Zukunft des HST noch nicht entschieden ist, steht schon
das nächste Weltraumteleskop in den Startlöchern. Es soll für
noch bessere Bilder sorgen, und anders als das Hubble nicht um die Erde kreisen,
sondern sich zwischen der Sonne und der Erde aufhalten.
Im folgenden Kapitel soll es um die zur Zeit stattfindenden Marsmissionen der NASA und der ESA gehen. Der Mars soll sowohl aus der Luft als auch am Boden genauer erforscht werden. Die Hauptaufgabe hierbei besteht darin, nach früher vorhandenen Wasservorkommen zu suchen, die ein Leben auf dem Mars bestätigen würden. Es soll ein Überblick über die Aufgaben und Ziele der Missionen und speziell über die in Deutschland entwickelte High Resolution Stereo Camera (HRSC) der ESA gegeben werden.
Im letzten Sommer waren sich der Mars und die Erde so nahe wie schon seit langer
Zeit nicht mehr, was zu einem wahren „Run“ auf den Mars führte.
Durch die Nähe der Planeten war es möglich die Flugzeit einer Marsmission
erheblich zu verringern. Obwohl die Marsmissionen seit Jahren geplant wurden,
war der Druck sehr hoch, die Marssonden in dem nur ein paar Wochen großen
Zeitfenster zu starten. Gerade bei der NASA wurde der Start der zweiten Trägerrakete
wegen schlechter Startbedingungen mehrmals verschoben.

Abb. 11 NASA Marsrover
Abb. 12 ESA Marsexpress
Während den Ingeneuren der Vikingmissionen in den siebziger Jahren noch
ein Milliarden Budget zur Verfügung stand, steht ihren Kollegen der heutigen
beiden Marsmissionen nur ein Bruchteil dieses Betrages zur Verfügung. Dieser
Unterschied kommt aber nicht dadurch zustande, dass Technik heutzutage billiger
geworden ist, sondern vielmehr darin, das in der heutigen Zeit selbst die NASA
zum Sparen gezwungen ist. Man kann sagen, das die Ingeneure mit weniger finanziellen
Mitteln mehr erreichen müssen.
Die Planung der aktuellen amerikanischen Marsmission hat schon weit vor der
1997 gestarteten Pathfindermission begonnen. Wie man schon vom Namen Pathfinder
(zu deutsch Pfadfinder) ableiten kann, sollte diese Mission ein Probedurchlauf
für die aktuelle Marsmission sein. Man erhoffte sich, dass die bei der
Pathfindermission gewonnenen Daten für die Verbesserung der Marsrovermission
dienen könnten. Die gewonnenen Daten der Pathfindermission erleichterten
die Entwicklung der Marsrover um einiges, aber vieles bereitete den Ingeneuren
auch Probleme. So musste viel Zeit investiert werden, die Bremsfallschirme neu
zu konzipieren, da die Fallschirme der Pathfindermission nicht für das
gesteigerte Gewicht der neuen Marsrover ausreichten. Dieses und weitere kleine
und große Probleme, führten dazu, dass der Start der Mission um einige
Tage nach hinten verlegt werden musste.
Wie schon in den siebziger Jahren wurden auch diesmal gleichzeitig zwei Lander
zum Mars geschickt, die an gegenüberliegenden Landestellen ihre Arbeit
verrichteten. Spirit, der erste der beiden Rover ist im Gusev-Krater gelandet,
der ausgeprägte Spuren eines früheren Sees erkennen lässt. Sein
Zwillingsbruder Opportunity kam einige Tage später am so genannten Meridiani
Planum an, da auch dieses für die Wissenschaftler der NASA von großem
Interesse ist.
Kurz bevor die beiden Raumkapseln der Rover in die Marsatmosphäre eingedrungen
sind, hatten sie eine Geschwindigkeit von ca. Mach 31.5, die durch die enorme
Reibung beim Eintritt deutlich gesenkt wird. Damit die Raumkapsel trotz der
gefallenen Geschwindigkeit noch stärker abgebremst, wird müssen Bremsfallschirme
benutzt werden. Die von Airbags umschlossenen, Kapseln können noch bis
zu einem Kilometer springen und rollen, bevor sie endgültig zur Ruhe kommen.
Trotz aller Vorsichtsmaßnahmen ist das eine der gefährlichsten Passagen
der gesamten Mission, da die Airbags an Felsen platzen und die Rover so unkontrolliert
auf dem Mars einschlagen könnten. Wenn die Kapsel zum Stillstand gekommen
ist, wird automatisch die Luft aus den Airbags entlassen, und drei Abdeckungen
geben die beiden Rover frei. Nachdem die Rover ihre Betriebsbereitschaft erreicht
haben, können sie mit ihrer eigentlichen Arbeit beginnen und ein erstes
360° Panoramabild machen, damit die NASA ihren Standpunkt bestimmen kann.
Die beiden Rover ähneln im Aufbau sehr ihrem Vorgänger Sojourner
der Pathfinder-Mission. Da sie um einiges größer sind, erhöht
sich ihr Gewicht auf jeweils 185 Kilogramm. Sie sind in der Lage sich pro Marstag
theoretisch maximal 100 m weit zu bewegen. Sojourner legte im Gegensatz dazu
diese Entfernung während seiner gesamten Mission zurück.
Die Rover sind aber auch im Bezug auf die Sicherheit weiterentwickelt worden.
Da die NASA die Bilder vom Mars mit einer Zeitverzögerung von etwa 20 min
erhält, könnte es sein, dass die Rover auf einem Felsen feststecken,
bevor die NASA auf diese Situation reagieren kann. Aus diesem Grund ist die
Software der Rover in der Lage, selbstständig zu entscheiden, wie in bestimmten
Situationen reagiert werden soll. Wenn man also die Steuerung der Rover etwas
knapp beschreiben würde, könnte man sagen, dass die NASA die Untersuchungsziele
aussucht, und die Rover den Weg dorthin selbstständig finden.
Die Rover beziehen ihre Energie aus ihren Solarzellen, die am Tag durch die
Sonne aufgeladen werden. Falls die Zellen eines Rovers ausfallen sollten, wäre
die Mission für ihn beendet, da es sonst keine Möglichkeit der Energiegewinnung
an Bord der Rover gibt. Da die Rover extremen Temperaturschwankungen ausgesetzt
sind, werden bestimmte Aufgaben in der Nacht erfüllt, um mit der abgegebenen
Wärme bestimmter Instrumente die Rover zu wärmen. Würde man dies
nicht machen, würde die meiste Energie für das Warm-Halten von Spirit
und Opportunity verschwendet werden.
Wie man auf Abb.13 erkennen kann, besitzen beide Rover einen Kameramast, an
dem sich die verschiedensten Kamerasysteme befinden. Eine Kamera wird für
die Navigation benutzt, während zwei andere, die sich parallel zueinander
befinden, für drei dimensionale Panoramaaufnahmen benötigt werden.
An der Vorderseite befindet sich ein Instrumentenarm, der je nach Aufgabe verschiedene
Instrumentenköpfe benutzen kann. Das Wechseln dieser Köpfe wird automatisch
durchgeführt. Um einen kleinen Überblick über die Arbeiten der
Rover zu geben, werden im Folgenden drei Instrumente etwas näher beschrieben.
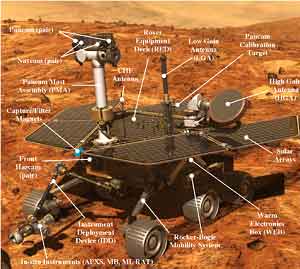
Abb. 13 Bezeichnung der Bestandteile eines Marsrovers
Beim Mini-TES handelt es sich um ein Instrument, das die emittierte Wärmestrahlung von z.B. Gesteinsbrocken misst und analysiert. Durch dieses Verfahren wird die Zusammensetzung von Gesteinsbrocken und dem Marsboden genauer untersucht. Es kann also festgestellt werden, ob sich Kohlenstoffe, Silikate, organische Moleküle und durch Wasser geformte Mineralien auf dem Mars befinden. Es wird Infrarotstrahlung benutzt, da sie in der Lage ist, auch durch Marsstaub bedeckte Objekte zu untersuchen. Durch die Messung der Wärmestrahlung sind die Wissenschaftler auf der Erde in der Lage, hochauflösende Temperaturprofile zu erstellen, oder genauere Aussagen über die Wärmespeicherkapazität von auf dem Mars befindlichen Gesteinen und Böden zu machen.
Mit dem sogenannten Microscopic Imager können Nahaufnahmen von Gesteinen
und dem Marsboden gemacht werden, da es sich bei diesem Instrument um eine Kombination
aus Mikroskop und Kamera handelt.
Um ein Schwarzweißbild mit der Größe von neun Quadratzentimetern
( drei Zentimeter Kantenlänge) zu machen, muss der Microscopic Imager bis
auf sechs Zentimeter an das zu untersuchende Objekt heran gebracht werden. Der
Microscopic Imager wird benutzt um von unter Wasser geformtes Sedimentgestein
zu finden, was beweisen würde, dass es auf dem Mars früher Wasser
gegeben hat. Auch Verformungen des Gesteins aufgrund vulkanischer Aktivitäten
oder durch Asteroideneinschläge können mit Hilfe des Microscopic Imager
entdeckt werden.
Um mit dem Mössbauer-Spektrometer arbeiten zu können, muss es mit
der zu untersuchenden Probe direkt in Kontakt gebracht werden. Da das Spektrometer
für eine Messung eine Messdauer von mindestens zwölf Stunden benötigt,
wird es wie oben beschrieben häufig nachts eingesetzt, um die Rover zu
wärmen.
Mit dem Mössbauer-Spektrometer soll das Vorhandensein und die Zusammensetzung
von eisenhaltigen Mineralien gemessen werden, da die wichtigsten Mineralien
auf dem Mars Eisen enthalten und Informationen über die früheren auf
dem Mars befindlichen Umweltbedingungen geben können. Des weiteren ist
das Mössbauer-Spektrometer in der Lage festzustellen, welche magnetischen
Eigenschaften untersuchte Objekte besitzen und ob sie möglicherweise fossile
Spuren von Lebensformen enthalten könnten.
Auch die ESA setzt auf die Technik eines Mössbauer-Spektrometers, da im
Lander Beagle2 ein an der UNI Mainz entwickeltes eingebaut wurde.
An Bord von Spirit und Opportunity befindet sich eine 25 Mhz starke PowerPC-CPU
mit 32 Bit vom Typ RAD6000 (RISC-Architektur), mit einem 128 DRAM großem
Arbeitsspeicher und einem 3 MB großen EEPROM. Die PowerPC Platform wurde
nach AIM 1991 spezifiziert. AIM ist die Abkürzung für ein Konsortium
aus Apple, IBM und Motorola. PowerPC-Prozessoren beherrschen Fließkommazahlen
doppelter und einfacher Genauigkeit und arbeiten im Big Endian-Modus. Es gibt
aber auch einzelne Prozessormodelle, die alternativ in den Little Endian-Modus
umschalten können.
Man kann PowerPC-Prozessoren z.B. in Apple-Macintosh-Rechnern, in Embedded Systemen
und im Nintendo GameCube finden.
Wenn man sich die Taktrate von 25 Mhz ansieht, wird man sich fragen, ob diese
nicht etwas gering ist angesichts von heutigen Prozessoren mit 3 Ghz,. Da man
nur eine begrenzte Energie zur Verfügung hat, kann man keine Energie verzehrenden
Prozessoren (z.B. Intels P IV) in die Rover einbauen, wenn ein etwas optimierter
Chip mit 25 Mhz vollkommen ausreichend ist.
Die Rover besitzen auch ein Betriebssystem, und zwar handelt es sich hierbei
um VxWorks der Firma Wind River. VxWorks ist ein Echtzeitbetriebssystem, d.h.
dass das Betriebssystem zusätzliche Echtzeit-Funktionen für die Einhaltung
von Zeitbedingungen und die Vorhersagbarkeit des Prozessverhaltens einsetzt.
VxWorks wird aber nicht nur im Weltall eingesetzt, sondern findet auch Zuspruch
in Embedded-Systemen, in der industriellen Fertigung (z.B. bei der Steuerung
von Fertigungsrobotern) und sogar in der Formel1
Während die NASA ihre Hauptaufgaben mit ihren beiden Mars-Rovern auf dem Mars direkt erledigt, ist bei der ESA die Aufgabenteilung in zwei Bereiche unterteilt. Da währe zum einen die Raumsonde Marsexpress, die mit Hilfe der HRSC die Marsoberfläche aufnimmt, und zum anderen der Marslander Beagle, der auf der Marsoberfläche verschieden Experimente durchführt.

Abb. 14 ESA Marslander Beagle2
Nach einigen Problemen mit Marsexpress musste die ESA vor einigen Wochen, auch
die
Beagle - Mission für gescheitert erklären. Seit dem Abkoppeln von
Beagle von der Raumsonde sei kein Kontakt mehr zustande gekommen, und es sei
eine unabhängige Kommission ins Leben gerufen, die klären soll, wie
es zu diesem Problem gekommen ist. Trotz verschiedener Rettungsversuche habe
sich Beagle nicht einmal gemeldet, und es sei unklar wo sich Beagle momentan
befindet.
Wenn man die Marsmission der NASA und der ESA vergleicht, sieht man, dass die
NASA in bestimmten Bereichen einen sicheren Weg eingeschlagen hat. Das bedeutet
aber nicht, dass die ESA nicht genau genug war, sondern dass die NASA durch
ihre Pathfinder-Mission gewisse Vorteile hatte.
So sendeten z.B. die beiden Rover an bestimmten Abschnitten ihrer Eintrittsphase
in die Marsoberfläche Kontrollsignale, damit die NASA genau wusste, in
welcher genauen Phase sich die Rover befinden. Dieses Verfahren schützte
die Rover nicht vor einem Absturz, es kann aber die Fehleranalyse entscheidend
erleichtern, wenn man genau weiß, in welcher Phase ein Fehler aufgetreten
ist.
Obwohl Beagle von der ESA als verloren angesehen wird, soll trotzdem auf seine Aufgaben eingegangen werden.
Etwa fünf Tage bevor die Sonde Mars Express am Mars eintrifft, wird Beagle2
von ihr abgekoppelt und setzt seine Reise zur Oberfläche alleine fort.
Der Eintritts- und Landevorgang hat in etwa den gleichen Ablauf wie der Mars
Exploration Rover.
Bei den Hauptzielen des in England entwickelten Beagle2 handelt es sich um biochemische
und biologische Untersuchungen auf der Marsoberfläche. Um diese Ziele zu
erreichen, besitzt Beagle2 verschiedene Komponenten, z.B. den Robotarm oder
den sogenannten Maulwurf.
Am Robotarm befinden sich alle Instrumente und verschiedene Kameras. Es gibt
drei Kameras, wovon zwei dazu genutzt werden, Panoramaaufnahmen der Oberfläche
zu machen (im Stereoverfahren). Die dritte Kamera, die Teil eines Mikroskops
ist, wird genutzt, die Beschaffenheit von Felsen etwas genauer zu untersuchen.
Am Robotarm befindet sich aber auch das Grinder and Corer System, das Felsen
für die Untersuchungen reinigen soll und in der Lage ist, ein etwa einen
Zentimeter tiefes Loch in einen Felsen zu bohren, um cirka 60 Milligramm schwere
Proben aus dem Inneren zu erhalten.
Der Maulwurf, auch Pluto (Planetary Undersurface Tool) genannt, kann dank eines
Federmechanismus den Aktionsradius von Beagle 2 um etwa drei Meter erhöhen.
Da Beagle2 eine geringe Größe besitzt, wurde auf Antennen verzichtet,
die in der Lage wären die Bilder und Messergebnisse direkt zur Erde zu
senden. Aus diesem Grund braucht Beagle2 immer eine Relaisstation für den
Datentransport. Normalerweise übernimmt Mars Express diese Aufgabe, aber
da sich die Sonde nicht permanent in einer geeigneten Position befindet, weicht
die ESA auf die amerikanische Sonde Mars Odyssey aus, die sich auch in einer
Umlaufbahn um den Mars befindet.
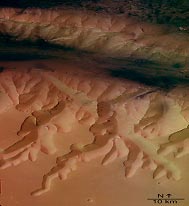
Abb. 15 Aufnahme der HRSC vom Mars
Im folgendem Kapitel wird die an der FU Berlin entwickelte High Resolution Stereo Camera behandelt. Dabei sollen folgende Fragen beantwortet werden: Was ist eine High Resolution Stereo Camera? Welche Aufgaben hat sie und wie funktioniert sie?
Man kann Marsexpress und die darin befindlichen HSRC mit einem Erderkundungssatellit
vergleichen, da sie im Prinzip die gleichen Aufgaben haben. Wie schon Spot5
ist auch die HRSC Kamera in der Lage, einen Geländebereich aus verschiedenen
Blickwinkeln aufzunehmen, sodass man am Ende eine dreidimensionale Karte vom
Mars erhält. Die Hauptaufgabe von der HSRC besteht also darin eine Landkarte
vom Mars zu erstellen.
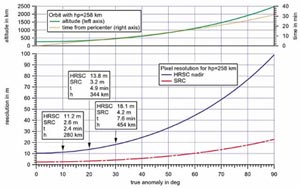
Tab.1 Abhängigkeit der Auflösung von der Flughöhe der HRSC
Die High Resolution Stereo Camera ist aber nicht speziell für die Mars Expressmission entwickelt worden, sondern sie sollte schon in der 93 Marsmission von Russland zum Einsatz kommen. Nachdem es aber Probleme mit dem Start der damaligen Trägerrakete gab, und die finanziellen Mittel zu Ende gingen, wurde das Projekt bis heute auf Eis gelegt. High Resolution Stereo Cameras werden aber nicht nur in der Raumfahrt eingesetzt. Es gibt eigens HRSC die nur auf der Erde ihre Anwendungsbereiche haben. So werden sie z.B. in Flugzeugen eingebaut, um 3D Karten von z.B. Deutschland zu erstellen.
Da sich Marsexpress in einer elliptischen Bahn um den Mars bewegt, ist die
Auflösung von 10m pro Pixel nur für einen bestimmten Zeitraum möglich,
nämlich dann, wenn sich die Sonde sehr nah am Mars befindet (ca. 250 km
über der Marsoberfläche). Je weiter sich Marsexpress vom Mars entfernt,
umso gröber wird auch die Auflösung der Bilder. Marsexpress ist dadurch
nur 40 min bei einer Umrundung in der Lage, Bilder vom Mars aufzuzeichnen.
Der Mars-entfernteste-Punkt wird dazu genutzt, Daten zur Erde zu senden und
die Batterien der Sonde wieder zu laden.
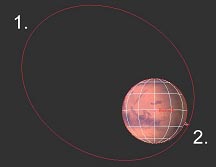
Abb. 16. Umlaufbahn von Marsexpress
Ursprünglich war von der ESA geplant, 50 % der Oberfläche des Mars mit
einer Auflösung von 15m/Pixel und 100% der Oberfläche mit 30m/Pixel
aufzunehmen. Dieser Plan konnte aber nicht eingehalten werden, da 30% der Energieleistung
durch einen Defekt in einer Solarzelle dauerhaft fehlte. Die Ingeneure der ESA
und der HSRC waren also gezwungen, den Energieverbrauch der gesamten Sonde zu
senken.
Auch die Auflösung der Bilder musste geändert werden, um Strom zu sparen.
Aus diesem Grund sollen 50% der Oberfläche mit 10-20m/Pixel, 75% mit 40m/Pixel
und 100% mit 100m/Pixel aufgenommen werden. Trotz dieser Einschränkung ist
der Einsatz der HSRC ein Erfolg.

Abb. 17 Bauteile der HRSC
Die HRSC besteht aus vier Komponenten, der HRSC Linse (Nr 1. Abb 17), der SRC
Linse (Nr. 2 Abb 17), der eigentlichen Aufnahmetechnik und der Digitaleinheit
(Nr3. Abb. 17).
Der SRC (Super Resolution Channel ) wurde unter anderem von Karl Zeiss entwickelt
und soll bestimmte Bereiche der Marsoberfläche mit einer Auflösung
von 2.3m/Pixel aufnehmen. SRC wird auch als Lupe bezeichnet, da er bestimmte
Bereiche hochauflösenden aufnehmen kann. Der SRC kann entweder permanent
der HRSC, nur an bestimmte Punkte oder in bestimmten Intervallen zugeschaltet
werden. Dabei ist immer bekannt, welche Daten von der HRSC oder vom SRC aufgenommen
wurden.
Die Digitaleinheit (Nr. 4 Abb. 17) besteht aus fünf Teilen, dem Kamera
Kontroll Processor, der Datenkompressionselektronik, dem Interface Electronics,
der Energieversorgung und der Wärmekontrollelektronik die im Folgenden
näher beschrieben sind.
Der Kamera Kontroll Processor ist die zentrale Kontrolleinheit für das
gesamte Kamerasystem. Im Kamera Kontroll Prozessor werden die Kontrolldaten
und die Telekommands der Raumsonde bearbeitet.
Der CCP besteht aus einem 80C86 Prozessor, ein boot PROM, einem EEPROM sowie
RAM.
Der 80C86 ist eine 16 Bit CMOS CPU mit einer Taktrate von 5Mhz. Da sich ein
EEPROM mit beliebigen Daten beschreiben lässt und auch wieder gelöscht
werden kann, wird er eingesetzt, um während der Mission Veränderungen
der Software möglich zu machen.
Ein Microcontroller und vier Kompressionseinheiten sind die Hauptbestandteile
der Datenkompressionselektronik. Die Kamera besitzt vier Signalleitungen, die
mit dem Input Speicher der Kompressionseinheiten verbunden sind.
Wenn die Daten von der Kamera zu den Kompressionseinheiten kommen, werden sie
in einem Puffer zwischengespeichert, bevor sie von Microcontrolern im JPEG Format
komprimiert werden. Nachdem die Daten in den einzelnen DC´s komprimiert
wurden, wird ein paralleler Datenstrom aus den 4fach parallelen Daten erzeugt.
Ein Microcontroller vom Typ 80C31 übernimmt die Erzeugung des seriellen
Datenstroms und die Einstellung der Kompressionsrate.
Die IFE besteht aus zwei Boards:
Die IFE01 beinhaltet die Schnittstellen niedriger Datenrate zwischen Kamerakopf,
Datenkompressionselektronik, dem Raumfahrzeug und dem Kamera Kontroll Prozessor.
Die IFE02 beherbergt die Schnittstellen für hohe Datenraten, die den Datentransfer
der wissenschaftlichen Bilddaten zum Massenspeicher gewährleisten.
Die Digitaleinheit und der Kamerakopf werden vom Energiesystem mit genügend Energie versorgt. Ein Energieumwandler in der Digitaleinheit sorgt für die Energie des SRC.
Das Kamerasystem ist wärmetechnisch von der Sonde isoliert. Um den thermischen Zustand der Kamera zu kontrollieren, wird das Heizsystem eingesetzt. Kühlstreifen und Radiatoren leiten die von der Kamera abgegebene Energie nach außen. Gleichzeitig heizen sechs unabhängige Heizspiralen in der optischen Bank und in den „front end electronics“ die Kamera auf etwa Raumtemperatur (ca. 20 Grad) auf. Die thermale Kontrolle wird unabhängig von der Elektronik der Kamera betrieben.
Die HRSC nimmt ihre Umgebung mit neun einzelnen CCD-Zeilen auf. Es wird nicht wie bei einer handelsüblichen Digitalkamera immer ein ganzer Bereich aufgezeichnet, sondern Zeile für Zeile. Vier der neun Zeilen sind für die Aufnahme der Spektralbereiche gedacht, und 5 für die Stereo-Aufzeichnungen.
Die HRSC nimmt die Marsoberfläche in verschiedenen Bereichen des sichtbaren Lichts auf. Das geschieht in den Bereichen Rot (750+/-20nm), Grün (530+/-45nm) und Blau (440+/-45nm). Dazu sind unterschiedliche Farbfilter vor den entsprechenden CCD-Zeilen montiert. Wenn man diese Farbdaten bei der Bildbearbeitung übereinander legt, ergibt sich aus der Mischung die Farbe, die von der Kamera auf dem Marsboden gesehen wurde. Eine weitere Zeile nimmt die Oberfläche im nahe Infrarotbereich (970+/-45nm) auf.
Die fünf übrigen CCD-Zeilen sind für die Stereoaufnahmen zuständig.
Eine Zeile nimmt den Bereich auf, der sich genau senkrecht unter der Raumsonde
befindet. Zwei weitere schauen in Flugrichtung nach vorn und zwei nach hinten.
Dadurch wird jedes Objekt, das auf dem Mars aufgenommen wird, aus fünf
unterschiedlichen Blickwinkeln aufgezeichnet, so dass auf der Erde aus diesen
Daten ein 3D Modell der Oberfläche zusammengesetzt werden kann. Die äußersten
beiden Zeilen nehmen die Landschaft in einem Winkel von +18.9° bzw. –18.9°
auf.
Die Zeilen dazwischen haben einen etwas geringeren Winkel.
Eine CCD-Zeile besteht aus 5184 Pixeln. Wenn sich die Raumsonde in einer Höhe von 250 km befindet, nimmt eine CCD-Zeile einen Streifen mit einer Breite von 52 km auf. Die gesamte Länge die von den neun Zeilen abgedeckt wird, beträgt 172 km.
Der SRC nimmt die Marsoberfläche nimmt nicht mit einem Zeilensensor, sondern
mit einem Flächesensor auf. Der verwendete Flächensensor hat eine
Größe von 1024x1032 Pixeln, und deckt bei einer Flughöhe von
250 km einen quadratischen Bereich von 2.35 x 2.35 km ab.
Dieses Bild zeigt die Anordnung der 9 einzelnen CCD-Zeilen. Die vier farbig
dargestellten Zeilen nehmen Spektralbereiche von rot, grün, blau und den
jenseits von rot liegenden nahen Infrarotbereich auf. Die fünf weiß
dargestellten Streifen entsprechen den Stereo- und Photometriekanälen.
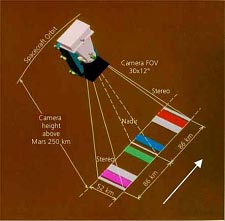
Abb. 18 CCD-Zeilen der HRSC
Die Bilddaten der HRSC und SRC werden an Bord reduziert und komprimiert, bevor
sie zur Erde gesendet werden. Dabei kommen zwei Verfahren zum Einsatz, die Pixelsummierung
und die JPEG basierende Datenkomprimierung.
Bei der Pixelsummierung werden aus benachbarten Pixel Durchschnittswerte gebildet.
So bleibt bei einer 1x1 Pixelsummierung die volle Auflösung erhalten, und
bei einer 2x2 Pixelsummierung wird der Datenstrom vier mal kleiner. Bei der
2x2 Summierung werden immer vier Pixel zusammen gefasst. Das entspricht einem
quadratischem Bereich mit einer Kantenlänge von zwei Pixeln. Außer
die 1x1 und die 2x2 Summierung kommen auch noch die 4x4 und die 8x8 Pixelsummierung
zum Einsatz.
Bei der Datenkomprimierung nach dem JPEG-Verfahren wurde nach umfangreichen
Tests der Kompressionsfaktor auf einen variablen Wert zwischen vier und zehn
festgelegt. Dadurch wird eine auf verschiedene Bildeigenschaften zugeschnittene
Reduktion des Datenaufkommens bei akzeptablen Qualitätsverlusten ermöglicht.
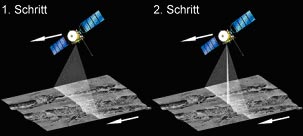
Abb. 19 Aufnahmetechnik der HRSC (Teil1)
Die HRSC fliegt an Bord der Sonde über die Marsoberfläche und nimmt diese Zeile für Zeile auf. Man könnte das Vorgehen mit einem Scanner vergleichen, da das zu scannende Blatt auch Zeile für Zeile aufzeichnet.
Die SRC kann zugeschaltet werden und nimmt dann innerhalb des Gesichtsfelds der Zeile sehr hochauflösende Detailaufnahmen auf. Dem Kamerasystem ist dabei immer genau bekannt, welche Pixel zur HRSC und welche zur SRC gehören. HRSC liefert also den räumlichen Kontext zu den SRC-Aufnahmen.
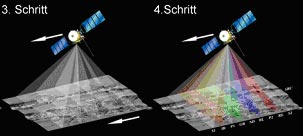
Abb. 19 Aufnahmetechnik der HRSC (Teil2)
In diesem Schritt werden vier weitere Zeilen dazu geschaltet, wovon zwei nach vorne und zwei nach hinten schauen. Dadurch wird jedes Objekt aus fünf Blickrichtungen aufgezeichnet. Anhand dieser Informationen kann der Computer später ein digitales Höhenmodell erstellen.
Zum Schluss werden vier weitere Zeilen aktiviert, vor denen die verschiedenen
Farbfilter montiert sind. Insgesamt wird die Marsoberfläche mit neun Zeilen
abgescannt.
„Der Weltraum – unendliche Weiten“. Diese wohl jedem bekannte
Aussage einer berühmten Fernsehserie kann ich nur zustimmen, nach dem ich
einige Zeit in verschiedenen Quellen nach Material gesucht habe. Es kommt einem
am Anfang so vor, als würde man ständig auf einem schmalen Seil zwischen
dem Mond und der Erde balancieren immer in Gefahr sich in Nichtigkeiten zu verlaufen.
Wenn man dann nach einiger Zeit einen scheinbaren Anfang gefunden hat scheitert
man oft an der dürftigen Ausbeute seines Streifzuges durch die Welt der
Bücher und des Internet.
Irgendwann ist man an dem Punkt angelangt, an dem man nicht mehr zurück
kann, und man versucht aus den dürftigen Informationen das beste heraus
zu ziehen. Und plötzlich passiert es, man füllt Seite für Seite
mit Informationen über die verschiedensten Bereiche der Technik und Wissenschaft.
Und die Fragen die einen schon seit einiger Zeit beschäftigen finden im
gewissen Maße eine Antwort. Wann werden wir den Mars besiedeln, schaut
der große Bruder wirklich auf uns herab und was ist ein schwarzes Loch.
Auf all diese Fragen kann man eine Antwort finden, wenn man sich etwas näher
mit dem Thema „Multimedia im Weltall“ beschäftig. Obwohl der
Name dieses Seminar meiner Meinung nach nicht so glücklich gewählt
ist, kann man trotzdem viel bei der Ausarbeitung lernen.
Wenn man z.B. Hollywoodfilme sieht, könnte man denken das jeder Schritt
von uns aus dem Weltall genau beobachtet wird, und man bekommt ein bedrückendes
Gefühl in der Magengegend. Dabei sieht die Wirklichkeit nicht ganz so düster
aus. Es ist schon im gewissem Maße möglich aus dem Weltall beobachtet
zu werden, aber mir ist kein heutiges Satellitensystem bekann was die nötige
Auflösung hat um einzelne Personen zu identifizieren. Da ist die Gefahr
von Überwachungskameras in Einkaufsstrassen oder Geschäften aufgezeichnet
zu werden viel greifbarer.
Auch auf die Frage ob es jemals Leben auf dem Mars gegeben hat, und ob eventuell
durch einen Asteroidencrash das leben vom Mars auf die Erde gekommen ist, kann
ich bis jetzt noch nicht eindeutig beantworten. Aber es spricht schon viel dafür,
angesichts das der Mars die Schießscheibe unseres Sonnensystems ist. Und
ob der Strafe Zeitplan der Amerikaner zur Besiedelung des Mars eingehalten werden
kann, wage ich doch zu bezweifeln. Aber wir haben ja auch schon eine Mondlandung
gesehen, die bis heute noch umstritten ist.
Wenn ich an meine Kindheit zurück denke, an den „Kalten Krieg“
läuft mir schon ein Schauer über den Rücken, aber wo wäre
die Raumfahrt heute, wenn es diesen Abschnitt der jüngsten Geschichte nicht
gegeben hätten. Fragen über fragen die hoffentlich in den nächsten
Jahren eine Antwort finden. Abschließend kann ich nur noch sagen, dass
es doch Spaß gemacht hat dieses Seminar zu halten, trotz der ganzen Probleme
in den Anfängen.